Idealizadas inicialmente para fins militares, as aeronaves remotamente pilotadas (ARPs), conhecidas como drones, são cada vez mais comuns. Seu uso abrange diversas áreas, de segurança a entretenimento. No Brasil, assim como em outros países, diversas pesquisas apontam a sua eficácia na agricultura de precisão.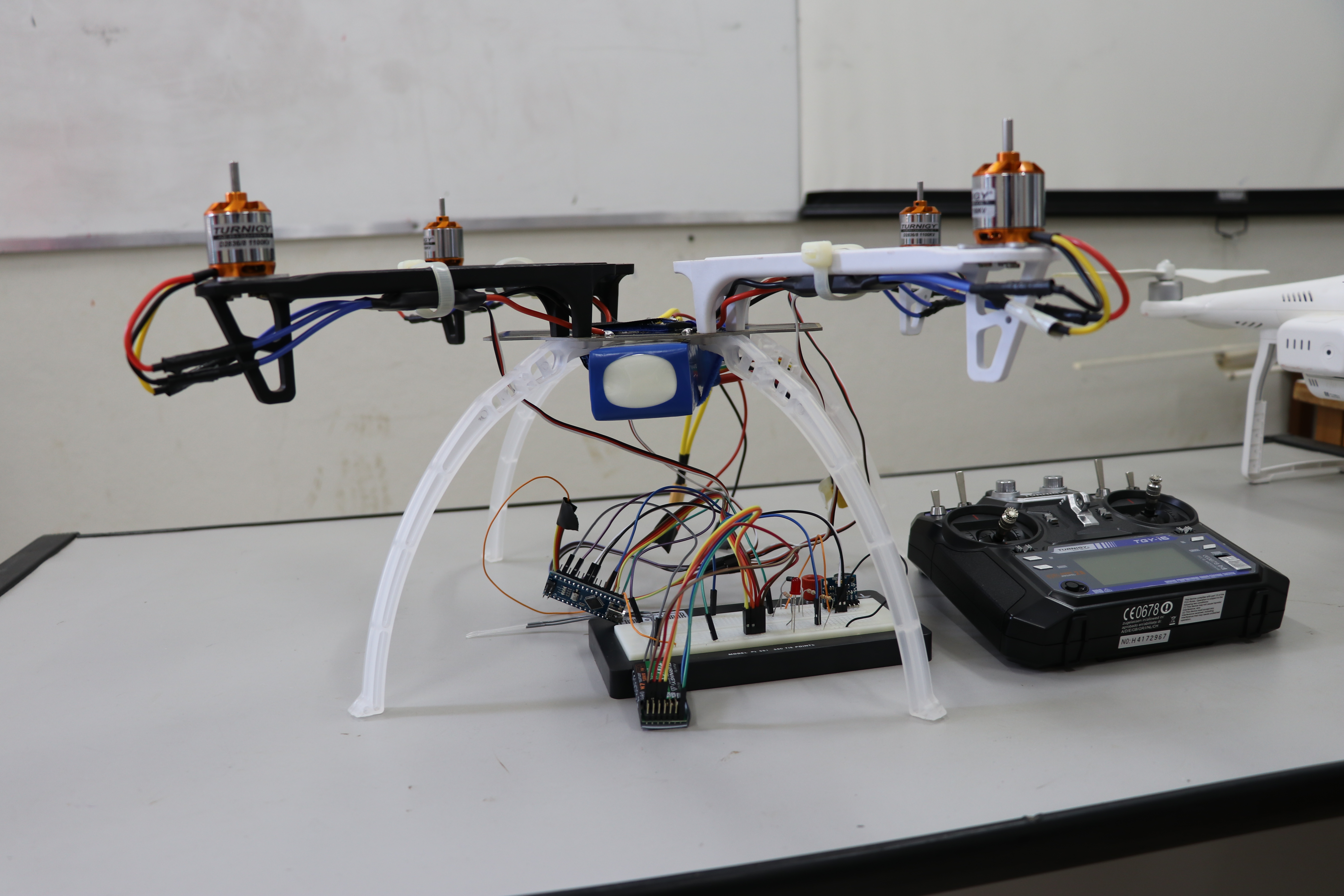
Na Universidade Federal de Lavras (UFLA), dois estudantes de Engenharia de Controle e Automação usaram como base diversas disciplinas do curso (eletrônica de potência, circuitos elétricos e programação) para a construção de um drone. O projeto teve início há pouco mais de um ano, sob orientação do professor Gabriel Araújo e Silva Ferraz, do Departamento de Engenharia (DEG/UFLA). Após a projeção inicial, as peças foram adquiridas no mercado “A primeira parte foi projetar quais peças seriam necessárias, depois comprar esses equipamentos e iniciar a montagem. O drone ainda não está pronto; porém, testes em bancada já mostraram que os resultados são bem promissores.”
Ainda de acordo com o professor, a intenção é que posteriormente a aeronave seja testada para aplicações diretas como na agricultura. Marcello Gonçalves Moreira e Eduardo Massayuki Iwasaki, graduandos do 8º período foram responsáveis pela iniciativa do projeto. Segundo Marcello, o drone possui os equipamentos comuns a outras aeronaves remotamente pilotadas, como receptor do controle remoto, sensor de inclinação, bateria e motor. A diferença está na placa controladora, que, neste caso, é um arduino montado no centro de sua estrutura. “Geralmente os drones para a agricultura de precisão exigem um voo autônomo, cujo processamento é muito potente, sendo para isso utilizada outra placa controladora. Nossa intenção foi desenvolver um controlador de voo que é bem mais barato do que os utilizados, reduzindo muito o custo e ainda, assim, com a garantia de que não haverá uma queda da aeronave. Na agricultura, nosso drone poderá ser utilizado para uso geral: como sobrevoar as plantações e registrar as fotos”.
O estudante explica todo o processo para a construção. “Para a programação dessa aeronave remotamente pilotada (ARP), do tipo quadricoptero com câmera acoplada, a estrutura mecânica foi comprada, modelo F450, toda em plástico firme para suportar o peso. Assim, nós analisamos o peso da estrutura com a bateria e a câmera para saber qual teria que ser a potência dos motores e das hélices para ele voar. Depois foram compradas as hélices e programamos a placa controladora arduino, tudo com a intenção de fazer um voo mais estável possível para conseguir tirar fotos de qualidade com baixo custo”. De acordo com os pesquisadores, o custo do drone construído foi de R$ 2 mil; no entanto, uma aeronave para o mesmo fim proposto é encontrada no mercado por cerca de R$ 10 mil.
O uso de aeronaves remotamente pilotadas (ARPs) para a coleta de imagens na agricultura permite ao produtor obter dados sobre o solo, a planta e microclimas da plantação, auxiliando no planejamento e alocação de recursos como água, fertilizantes, pesticidas, entre outros. O professor Gabriel ressalta ainda que a intenção é de divulgar o projeto à comunidade, para que qualquer pessoa possa tentar desenvolver sua própria aeronave.
Reportagem: Karina Mascarenhas, jornalista – bolsista Fapemig/Dcom
Edição do vídeo: Mayara Toyama, bolsista Fapemig/Dcom
Confira o vídeo:
Esse conteúdo de popularização da ciência foi produzido com o apoio da Fundação de Amparo à Pesquisa de Minas Gerais – Fapemig.






 Ela pode parecer estranha por fora, ganhou o nome de “fruta do dragão” em alguns países, mas o sabor suavemente adocicado da pitaia tem atraído muita gente. A fruta, da família cactaceae, é típica de regiões de clima quente e teve sua origem no México. No Brasil, o cultivo da pitaia começou na década de 90, com a produção concentrada no estado de São Paulo. Na Universidade Federal de Lavras (UFLA), o primeiro cultivo feito para estudos teve início em 2007, com o objetivo de ampliar as pesquisas com essa frutífera. Desde então, uma série de experimentos têm sido desenvolvidos como: propagação, adubação, poda, polinização artificial, colheita e pós-colheita.
Ela pode parecer estranha por fora, ganhou o nome de “fruta do dragão” em alguns países, mas o sabor suavemente adocicado da pitaia tem atraído muita gente. A fruta, da família cactaceae, é típica de regiões de clima quente e teve sua origem no México. No Brasil, o cultivo da pitaia começou na década de 90, com a produção concentrada no estado de São Paulo. Na Universidade Federal de Lavras (UFLA), o primeiro cultivo feito para estudos teve início em 2007, com o objetivo de ampliar as pesquisas com essa frutífera. Desde então, uma série de experimentos têm sido desenvolvidos como: propagação, adubação, poda, polinização artificial, colheita e pós-colheita.
